

搬運機器人的工作原理和類型
發布時間:
2023-02-10 11:30
搬運機器人顧名思義就是用于搬運物品的機器,一般由執行機構、驅動機構和控制機構三部分組成,可安裝不同的末端執行器來完成不同行業的搬運需求,代替了繁重的人工搬運。搬運機器人根據不同的設計形式,分為以下三個類型:
1、硬臂式助力機器人
在有扭矩產生的情況下無法使用氣動平衡吊或是軟索式助力機器人,而必須選用硬臂式助力機器人。可以實現提升最大500Kg的工件,半徑最大可以達到3000mm,提升高度最大2500mm。硬臂式機械手具有剛性手臂和全程重力平衡等諸多優點,因此被廣泛應用于需要越過障礙、要求精確定位、取置狀態受限、現場環境復雜、或系統承受扭力等場合。安裝形式可以是立柱式(地面固定)、懸掛固定式或是導軌移動式。

應用領域:電纜卷搬運、汽車制造、金屬制造、紡織、木工、建筑、工業鑄造、造紙、包裝、機電、航空、化工石油、制藥、食品、工廠車間流水線等行業物料搬運
2、多關節機器人
動作靈活、運動慣性小、通用性強、能抓取靠近機座的工件,并能繞過機體和工作機械之間的障礙物進行工作。
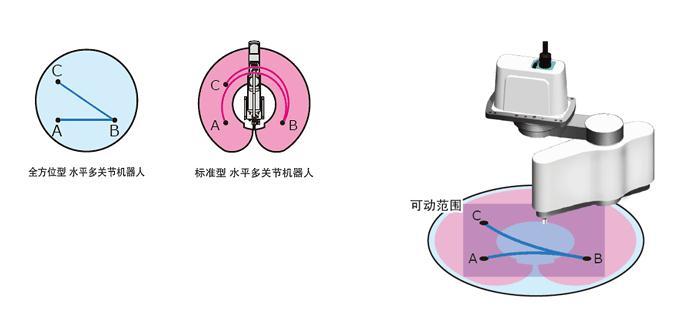
實現高精度的組裝作業 更卓越的品質,與并行鏈路機器人相比,具有更高的重復定位精度。徹底改善機器人內部結構,實現最佳重量平衡。此外,通過配備針對輕量和高剛度機械臂調節至最佳狀態的馬達,實現了高精度定位。
3、T型助力機器人
前后左右位移靠導軌來實現,更適合于操作空間狹小的場合。配有儲氣罐,可在斷氣情況下繼續使用一個循環,在氣壓下降到一定程度,啟動自鎖功能,防止工件下降。并設有安全系統,在搬運過程中或是工件沒有被放置在安全表面時,操作者不能釋放工件。
搬運機器人的出現可謂是重工業的福利,大大降低了人工的勞動強度,還能夠高效準時的完成工作任務。相信在科技不斷發展與進步的情況下,機器人會更加細化幫助我們完成更多繁重的工作任務,甚至是完成人工所不能完成的工作。
搬運機器人